Terra-former Robot
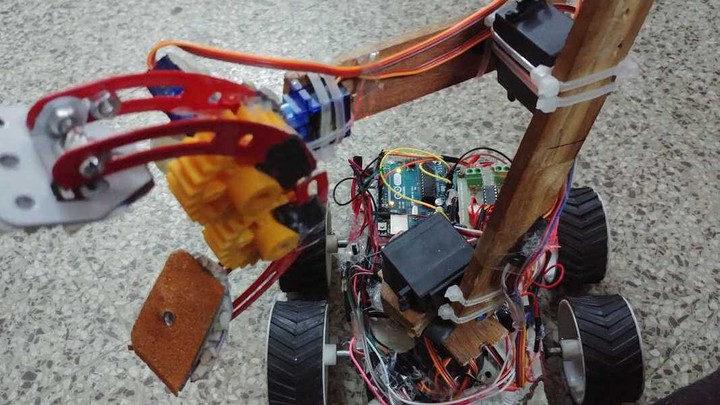 Photo by Khush Agrawal
Photo by Khush Agrawal
Abstract
Robots are widely used in manufacturing, assembly and packing, transport, earth and space exploration, surgery, weaponry, laboratory research, and mass production of consumer and industrial goods. A Robot equipped with a Pick-and-Place mechanism can be used for numerous applications. The gripper mechanism was created using two spur gears with one fitted to a servo and the other to a dead-axle. Four additional servos were used to create the robotic manipulator arm.
Contributions
- Aimed at developing a wirelessly controlled robot capable of moving objects.
- Developed a 3 DoF servo controlled arm with a gripper end effector for Pick-and-Place mechanism.
- Used 2 Arduinos for controlling arm and motion independently.
- Used a single channel relay for optimizing power consumption by switching off the arm when not in use.
- This project was presented for AXIS (Technical festival at NIT-Nagpur), 2017 and was awarded a prize for innovative design.